Welcome to 6D Object Pose Estimation
Definition
6D pose estimation is the task of detecting the 6D pose of an object, which include its location and orientation. This is an important task in robotics, where a robotic arm needs to know the location and orientation to detect and move objects in its vicinity successfully. This allows the robot to operate safely and effectively alongside humans. The awareness of the position and orientation of objects in a scene is sometimes referred to as 6D, where the D stands for degrees of freedom pose.

Goal
- The goal of 6D pose estimation is to find the translation and rotation from the object coordinate frame O to the camera coordinate frame C.
- 6D pose estimation aims to predict the orientation and location of an object in the 3D space from a canonical frame.
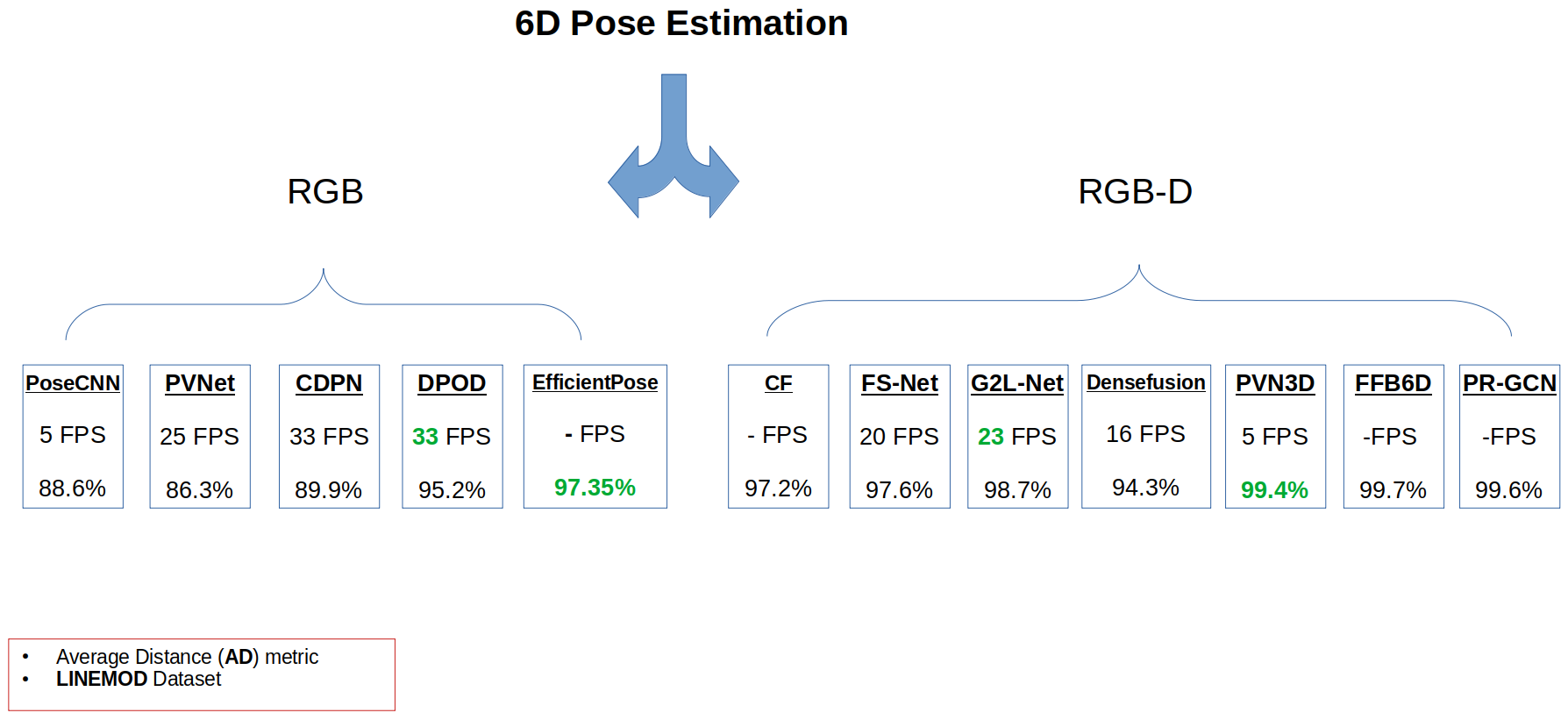
State of the art (SOTA)
Challenges
-
Instance-level 6D Object Pose Estimation
- Viewpoint variability
- Texture-less objects
- Occlusion
- Clutter
- Similar-looking distractors
- Object Variety
- Sensor Noise
-
Category-level 6D Object Pose Estimation
- Distribution shift among source and target
- High intra-class variations
- Shape discrepancies between objects
Note: Instances' challenges can also be observed at the level of categories, but not the other way round.
Methods
-
Instance-based Methods
- Templet-based [CAD, Reconstructed model]
- Point-to-point [Point pair features, Voting scheme]
- Conventional learning-based [Holistic, Part-based, ICP]
- Deep learning
-
Category-based Methods
- 2D
- 3D
- 4D
- 6D
Note A key technical challenge in performing 6D object pose estimation from RGB-D image is to fully leverage the two complementary data sources.
Evaluation Metrics
- Average Distance (AD) [Instance]
- 3D Intersection over Union (IoU) [Category]